Серводвигатели являются неотъемлемой частью многих проектов с использованием Ардуино. Они позволяют точно контролировать угол поворота, что делает их идеальными для применения в робототехнике, моделировании и автоматизации. Управление серводвигателем с помощью Ардуино довольно простое и доступное даже для начинающих. В этой статье мы рассмотрим основы работы с серводвигателями и покажем, как легко контролировать их угловое положение с помощью кода на Ардуино.
Как подключить и настроить серводвигатель
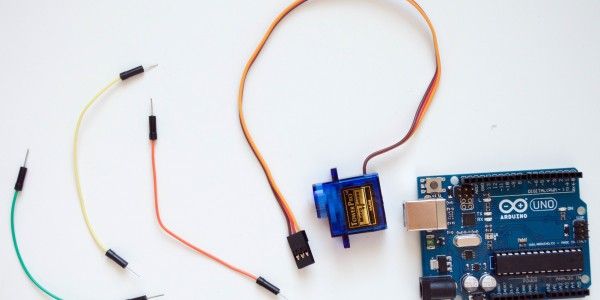
Для подключения серводвигателя к Ардуино вам понадобится сам серводвигатель, провода для подключения, а также питание для самого двигателя. Большинство серводвигателей имеют три проводка: питание (обычно красный), земля (черный или коричневый) и управляющий сигнал (желтый или оранжевый). Питание серводвигателя часто берется от внешнего источника, если ваш серводвигатель требует больше энергии, чем может обеспечить Ардуино. Контролировать угол поворота серводвигателя можно через управляющий пин, который подключается к одному из цифровых выводов Ардуино.
Настройка серводвигателя в коде начинается с использования библиотеки Servo, которая предоставляется по умолчанию в среде разработки Arduino IDE. Она позволяет вам легко управлять серводвигателем, отправляя команды на установку угла вращения. В коде для Ардуино необходимо указать пин, к которому подключен управляющий провод серводвигателя, а затем в программе задается угол, на который нужно повернуть двигатель. Серводвигатель может вращаться на углы от 0 до 180 градусов, и это значение передается через функцию write().
После того как серводвигатель подключен и настроен в коде, можно провести тестирование. При подаче питания на Ардуино и серводвигатель, если все подключено правильно, двигатель должен повернуться на указанный угол.
Программирование серводвигателя для изменения угла
Программирование серводвигателя для изменения угла с помощью Ардуино основывается на отправке команд через управляющий пин, который подключен к серводвигателю. Чтобы изменить угол поворота, достаточно использовать функцию write(), где указывается угол от 0 до 180 градусов. Например, если вы хотите повернуть серводвигатель на 90 градусов, в коде нужно будет написать команду myServo.write(90);. При этом серводвигатель плавно переместится в указанную позицию.
Чтобы создать плавное движение или изменить угол серводвигателя с течением времени, можно использовать цикл с небольшими задержками между изменениями угла. Это позволяет управлять серводвигателем поэтапно, например, перемещая его с 0 до 180 градусов с шагом 10 градусов с небольшой паузой, что сделает его движение более плавным. Такой подход может быть полезен для реализации различных механизмов или роботов, где точное управление углом имеет важное значение.
Ключевым моментом при программировании серводвигателя является понимание его характеристик, таких как скорость поворота и ограничения на угол. Серводвигатели, как правило, работают в пределах от 0 до 180 градусов, и попытки повернуть двигатель за эти пределы могут привести к повреждению. Поэтому всегда стоит следить за диапазоном углов и обеспечивать корректное управление двигателем, чтобы избежать непредвиденных сбоев.
Применение в моделях и робототехнике
Применение серводвигателей в моделях и робототехнике открывает большие возможности для создания механизмов с точным управлением углами. В моделях, таких как радиоуправляемые автомобили или вертолеты, серводвигатели часто используются для управления направлениями колес или управления аэродинамическими поверхностями, например, рулем. В таких проектах важен быстрый отклик и точность поворота, а значит, серводвигатели являются идеальным выбором.
В робототехнике серводвигатели служат для создания манипуляторов, которые могут захватывать и перемещать объекты, а также для контроля движений роботов, например, в шарнирных соединениях или колесах. Важно, что серводвигатели позволяют легко интегрировать механизмы с системой управления, так как они могут работать с датчиками и другими устройствами, обеспечивая обратную связь для точной работы.
Кроме того, серводвигатели часто используются в автоматических дверях, камерах наблюдения, а также в системах, где требуется точное и контролируемое движение. Например, в роботах для перемещения камеры, серводвигатели могут поворачивать камеру по заданному углу, предоставляя пользователю возможность контролировать обзоры в реальном времени. В таких применениях очень важна плавность и точность перемещения, которые обеспечиваются при помощи программирования и корректной настройки серводвигателя.
Комбинирование серводвигателей с другими датчиками
Комбинирование серводвигателей с другими датчиками значительно расширяет возможности системы и делает управление более интеллектуальным. Например, в роботах с использованием датчиков расстояния, таких как ультразвуковые датчики, можно интегрировать серводвигатели для изменения угла обзора или направления движения. Когда датчик обнаруживает объект на определенном расстоянии, серводвигатель может автоматически повернуть механизм или камеру в нужное положение, что делает систему более динамичной и автономной.
Также часто используют комбинацию серводвигателей с датчиками положения, такими как энкодеры, для более точного контроля углов поворота. Эти датчики предоставляют информацию о текущем положении механизма, позволяя более точно регулировать его движение и корректировать ошибки в системе. В таких проектах серводвигатель будет поворачиваться до заданного угла и останавливаться с высокой точностью, благодаря постоянной обратной связи от датчика.
Кроме того, серводвигатели могут работать в паре с датчиками температуры, например, в системах охлаждения, где изменение угла вентиляторов зависит от показаний датчика температуры. Таким образом, системы могут автоматически регулировать направление потока воздуха для поддержания оптимальных условий, делая оборудование более эффективным и энергоэкономичным.